工程师设计模块化系统来生产高效 可扩展的水上机器人
水下结构可以像鱼一样动态改变其形状,比传统的刚性船体更有效地推动水。但是,构建可变形的装置,既能改变其体型曲线,又能保持光滑的轮廓,是一个漫长而困难的过程。例如,麻省理工学院的RoboTuna由大约3个不同的部件组成,花了大约两年的时间来设计和建造。
现在,麻省理工学院的研究人员和他们的同事-包括来自原始RoboTuna团队的研究人员-提出了一种构建可变形水下机器人的创新方法,使用简单的重复子结构而不是独特的组件。该团队以两种不同的示例配置展示了新系统,一种像鳗鱼,另一种像翅膀一样的水翼。然而,研究人员说,该原理本身允许形式和规模几乎无限的变化。
这项工作今天发表在《软机器人》杂志上,麻省理工学院研究助理AlfonsoParraRubio,教授MichaelTriantafyllou和NeilGershenfeld以及其他六人发表了一篇论文。
用于海洋应用的软机器人的现有方法通常是在小尺度上制造的,而许多有用的实际应用需要米级的设备。研究人员提出的新模块化系统可以很容易地扩展到这样的尺寸甚至更高,而不需要扩展当前系统所需的那种重组和重新设计。
“可扩展性对我们来说是一个强项,”ParraRubio说。他说,鉴于构成其系统的称为体素的晶格状部件的低密度和高刚度,“我们有更多的空间来保持规模”,而目前使用的大多数技术“依赖于面临严重问题的高密度材料”转向更大的尺寸。
该团队的实验性概念验证设备中的单个体素大多是中空结构,由铸造塑料件组成,具有复杂形状的狭窄支柱。盒子状的形状在一个方向上是承重的,但在另一个方向上是柔软的,这是一种不寻常的组合,通过混合不同比例的刚性和柔性部件来实现。
“对待软机器人与硬机器人是一种错误的二分法,”ParraRubio说。“这是介于两者之间的东西,一种构建事物的新方法。麻省理工学院比特和原子中心负责人Gershenfeld补充说:“这是将两者的最佳元素结合在一起的第三种方式。
可变形机器人由格子状碎片制成,称为体素,密度低,刚度高。学分:麻省理工学院
“车身表面的平滑柔韧性使我们能够实施流量控制,可以减少阻力并提高推进效率,从而节省大量燃料,”Triantafyllou说,他是HenryL.和GraceDoherty海洋科学与工程教授,也是RoboTuna团队的一员。
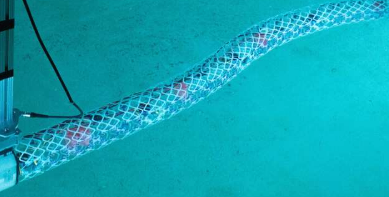
在团队制作的其中一个装置中,体素首尾相连成一长排,形成一米长的蛇状结构。主体由四个部分组成,每个部分由五个体素组成,中心有一个致动器,可以拉动连接到两侧两个体素中的每一个的电线,收缩它们并导致结构弯曲。然后将20个单元的整个结构覆盖有肋状支撑结构,然后是紧密贴合的防水氯丁橡胶表皮。研究人员将该结构部署在麻省理工学院的拖曳水箱中,以显示其在水中的效率,并证明它确实能够产生足够的向前推力,以使用起伏运动推动自己前进。
“以前有很多类似蛇的机器人,”Gershenfeld说。“但它们通常由定制组件制成,而不是这些可扩展的简单构建块。
单个体素大多是由铸造塑料片组成的空心结构,具有复杂形状的窄支柱。学分:麻省理工学院
例如,帕拉·卢比奥(ParraRubio)说,美国宇航局建造的类似蛇的机器人由数千个独特的部件组成,而对于这个群体的蛇,“我们显示大约有60个部件。他说,与设计和建造麻省理工学院机器人金枪鱼的两年时间相比,该设备在大约两天内组装完成。
他们展示的另一个装置是类似机翼的形状或水翼,由相同的体素阵列组成,但能够改变其轮廓形状,从而控制机翼的升阻比和其他特性。这种类似机翼的形状可用于多种用途,从从波浪发电到帮助提高船体的效率-这是一个迫切的需求,因为航运是碳排放的重要来源。
与蛇不同,翅膀的形状覆盖着一系列鳞片状的重叠瓷砖,旨在相互压压以保持防水密封,即使翅膀改变其曲率。一种可能的应用可能是在船体轮廓上添加某种内容,可以减少阻力诱导涡流的形成,从而提高其整体效率,该团队正在与航运业的合作者一起探索这种可能性。
最终,这个概念可能会应用于类似鲸鱼的潜水器,利用其可变形的身体形状来产生推进力。这种飞行器可以通过停留在地表以下来躲避恶劣天气,但没有传统推进的噪音和湍流。该概念也可以应用于其他船只的部件,例如赛艇,其中龙骨或方向舵可以在转弯时轻轻弯曲而不是保持笔直可以提供额外的优势。“而不是僵硬或只是有襟翼,如果你真的能像鱼一样弯曲,你可以更有效地绕弯,”Gershenfeld说。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
作为A股市场中极具代表性的黄金珠宝行业龙头企业,作为中国历史最悠久的珠宝品牌之一,老凤祥(股票代码:600612)...浏览全文>>
-
宝子们,杭州 房子装修完成啦!这次要给大家分享几家设计超赞的装修公司哦。它们各具特色,从空间规划到风格...浏览全文>>
-
欲筑室者,先治其基。在上海,装修房子对于每个业主而言,都是极为关键的一步,然而,如何挑选一家值得信赖的...浏览全文>>
-
2025年以来,联通支付严格贯彻落实国家战略部署,以数字和科技为驱动,做好金融五篇大文章,履行支付为民社会...浏览全文>>
-
良工巧匠,方能筑就华居;精雕细琢,方可打造美家。当我们谈论装修公司时,选择一家靠谱可靠的公司是至关重要...浏览全文>>
-
在当今社会,随着城市化进程的高速推进,建筑垃圾的产生量与日俱增。据权威数据显示,我国每年建筑垃圾产生量超 ...浏览全文>>
-
家人们,在上海要装修,选对公司那可太重要了!古语有云:"安得广厦千万间,大庇天下寒士俱欢颜。"一个温馨的...浏览全文>>
-
近年来,新能源汽车市场发展迅猛,各大品牌纷纷推出各具特色的车型以满足消费者多样化的需求。作为国内新能源...浏览全文>>
-
近年来,随着汽车市场的不断变化和消费者需求的升级,安徽滁州地区的宝来2025新款车型在市场上引起了广泛关注...浏览全文>>
-
随着汽车市场的不断变化,滁州地区的消费者对高尔夫车型的关注度持续上升。作为大众品牌旗下的经典车型,高尔...浏览全文>>
- 安徽滁州途安L新车报价2022款,最低售价16.68万起,入手正当时
- 小鹏G7试驾,新手必知的详细步骤
- 别克GL8预约试驾,4S店的贴心服务与流程
- 安徽阜阳ID.4 CROZZ落地价全解,买车必看的省钱秘籍
- 淮北探岳多少钱 2025款落地价,最低售价17.69万起现在该入手吗?
- 安徽淮南大众CC新款价格2025款多少钱能落地?
- 淮北长安启源C798价格,最低售价12.98万起现在该入手吗?
- 安徽淮南途锐价格,各配置车型售价全解析
- 蒙迪欧试驾预约,4S店体验全攻略
- 沃尔沃XC40试驾需要注意什么
- 滁州ID.4 X新车报价2025款,各车型售价大公开,性价比爆棚
- 试驾思域,快速操作,轻松体验驾驶乐趣
- 试驾长安CS35PLUS,一键搞定,开启豪华驾驶之旅
- 天津滨海ID.6 X落地价限时特惠,最低售价25.9888万起,错过不再有
- 天津滨海凌渡多少钱?看完这篇购车攻略再做决定
- 安徽池州长安猎手K50落地价,买车前的全方位指南
- 山东济南ID.6 CROZZ 2024新款价格,最低售价19.59万起,现车充足
- 试驾海狮05EV,新手必知的详细步骤
- 生活家PHEV多少钱 2025款落地价走势,近一个月最低售价63.98万起,性价比凸显
- 奇瑞风云A9试驾,新手必知的详细步骤