运动建模随着大脑启发的神经网络而发展
EPFL的一组科学家建立了一个新的神经网络系统,可以帮助了解动物如何根据自身身体的变化调整运动,并创建更强大的人工智能系统。
深度学习受到人工神经网络的推动,人工神经网络将简单的计算元素堆叠在一起,以创建强大的学习系统。只要有足够的数据,这些系统就可以解决具有挑战性的任务,例如识别物体、打败人类围棋以及控制机器人。
EPFL生命科学学院的AlexanderMathis教授说:“正如你想象的那样,将这些元素堆叠在一起的架构可能会影响你需要学习的数据量以及性能上限。”
三位科学家与博士生AlbertoChiappa和AlessandroMarinVargas合作,开发了一种名为DMAP的新网络架构,用于“分布式形态注意力策略”。这种网络架构结合了生物感觉运动控制的基本原理,使其成为研究感觉运动功能的有趣工具。
DMAP试图解决的问题是,动物——包括人类——已经进化到能够适应环境和自身身体的变化。例如,从蹒跚学步到成年,儿童可以适应其在所有身体形状和体重变化过程中高效行走的能力,并且可以在不同类型的表面等上这样做。在开发DMAP时,团队专注于动物如何能够当它的身体受到这些“形态扰动”——身体部位的长度和厚度的变化时,它就会学会走路。
“通常,在强化学习中,所谓的全连接神经网络用于学习运动技能,”Mathis说。强化学习是一种机器学习训练方法,可以“奖励”想要的行为和/或“惩罚”不需要的行为。
他继续说道:“想象一下,你有一些传感器可以估计你的身体状态——例如,你的手腕、肘部、肩膀等的角度。这些传感器信号是电机系统的输入,输出是肌肉激活,产生扭矩。如果一个人使用完全连接的网络,那么例如在第一层中,来自全身的所有传感器都会被集成。”相比之下,在生物学中,感官信息是以分层方式组合的。”
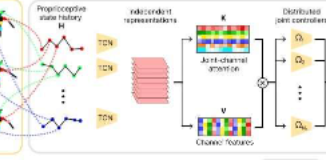
“我们采用了神经科学原理,并将它们提炼到神经网络中,以设计出更好的感觉运动系统,”AlbertoChiappa说。在第36届神经信息处理系统(NeurIPS)年会上发表的论文中,研究人员介绍了DMAP,它“结合了独立的本体感受处理、分布式策略和每个关节的独立控制器,以及注意力机制,以动态门控感官信息从不同的身体部位到不同的控制器。”
DMAP能够学会在身体受到形态扰动的情况下“行走”,而无需接收任何有关形态参数的信息,例如具体的肢体长度和宽度。值得注意的是,DMAP可以像可以访问这些身体参数的系统一样“行走”。
“因此,我们根据解剖学知识创建了一个强化学习系统,”AlbertoChiappa说。“在我们训练这个模型之后,我们注意到它表现出动态门控,让人想起脊髓中发生的事情,但有趣的是,这种行为是自发出现的。”
总的来说,像DMAP这样的模型有两个作用:基于生物学洞察力构建更好的人工智能系统,以及反过来构建更好的模型来理解大脑。
这些发现可在arXiv预印本服务器上获得。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
作为A股市场中极具代表性的黄金珠宝行业龙头企业,作为中国历史最悠久的珠宝品牌之一,老凤祥(股票代码:600612)...浏览全文>>
-
宝子们,杭州 房子装修完成啦!这次要给大家分享几家设计超赞的装修公司哦。它们各具特色,从空间规划到风格...浏览全文>>
-
欲筑室者,先治其基。在上海,装修房子对于每个业主而言,都是极为关键的一步,然而,如何挑选一家值得信赖的...浏览全文>>
-
2025年以来,联通支付严格贯彻落实国家战略部署,以数字和科技为驱动,做好金融五篇大文章,履行支付为民社会...浏览全文>>
-
良工巧匠,方能筑就华居;精雕细琢,方可打造美家。当我们谈论装修公司时,选择一家靠谱可靠的公司是至关重要...浏览全文>>
-
在当今社会,随着城市化进程的高速推进,建筑垃圾的产生量与日俱增。据权威数据显示,我国每年建筑垃圾产生量超 ...浏览全文>>
-
家人们,在上海要装修,选对公司那可太重要了!古语有云:"安得广厦千万间,大庇天下寒士俱欢颜。"一个温馨的...浏览全文>>
-
近年来,新能源汽车市场发展迅猛,各大品牌纷纷推出各具特色的车型以满足消费者多样化的需求。作为国内新能源...浏览全文>>
-
近年来,随着汽车市场的不断变化和消费者需求的升级,安徽滁州地区的宝来2025新款车型在市场上引起了广泛关注...浏览全文>>
-
随着汽车市场的不断变化,滁州地区的消费者对高尔夫车型的关注度持续上升。作为大众品牌旗下的经典车型,高尔...浏览全文>>
- 安徽滁州途安L新车报价2022款,最低售价16.68万起,入手正当时
- 小鹏G7试驾,新手必知的详细步骤
- 别克GL8预约试驾,4S店的贴心服务与流程
- 安徽阜阳ID.4 CROZZ落地价全解,买车必看的省钱秘籍
- 淮北探岳多少钱 2025款落地价,最低售价17.69万起现在该入手吗?
- 安徽淮南大众CC新款价格2025款多少钱能落地?
- 淮北长安启源C798价格,最低售价12.98万起现在该入手吗?
- 安徽淮南途锐价格,各配置车型售价全解析
- 蒙迪欧试驾预约,4S店体验全攻略
- 沃尔沃XC40试驾需要注意什么
- 滁州ID.4 X新车报价2025款,各车型售价大公开,性价比爆棚
- 试驾思域,快速操作,轻松体验驾驶乐趣
- 试驾长安CS35PLUS,一键搞定,开启豪华驾驶之旅
- 天津滨海ID.6 X落地价限时特惠,最低售价25.9888万起,错过不再有
- 天津滨海凌渡多少钱?看完这篇购车攻略再做决定
- 安徽池州长安猎手K50落地价,买车前的全方位指南
- 山东济南ID.6 CROZZ 2024新款价格,最低售价19.59万起,现车充足
- 试驾海狮05EV,新手必知的详细步骤
- 生活家PHEV多少钱 2025款落地价走势,近一个月最低售价63.98万起,性价比凸显
- 奇瑞风云A9试驾,新手必知的详细步骤